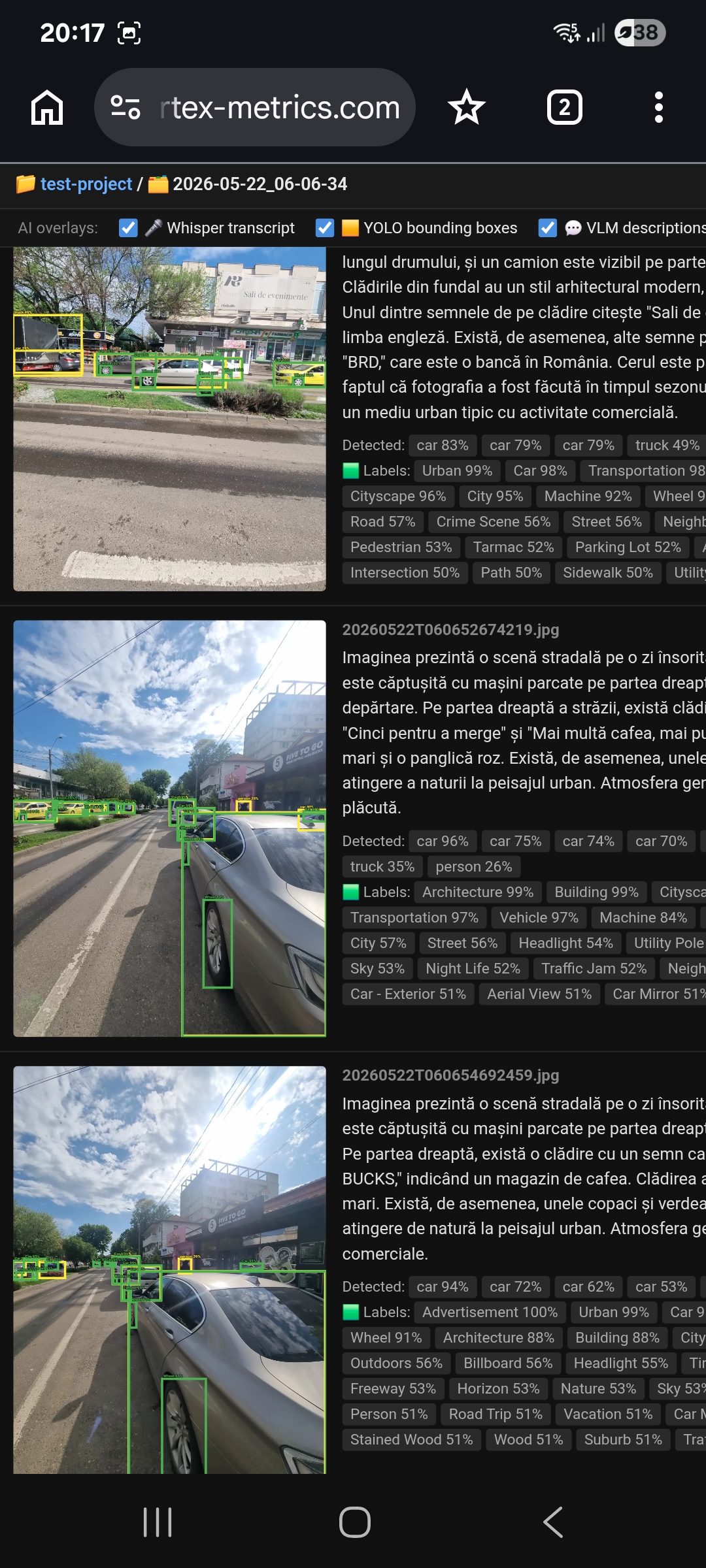
Remote Capture Engine
Field capture and structured insights. One-tap browser capture, EU-hosted (GDPR by design). Native English & Romanian support. Exploring partnerships with field teams in construction, maintenance, and field service.
Ioan Cleju, PhD — Founder
Bridging the gap between advanced sensor fusion research and industrial reality.
With nearly 20 years of expertise, I specialize in delivering cm-level positioning systems and architecting R&D environments that move technology from the bench to the field. I oversee the entire product lifecycle — from initial concept and prototyping to production readiness — with a direct, hands-on commitment to getting the physics right.
Field capture and structured insights. One-tap browser capture, EU-hosted (GDPR by design). Native English & Romanian support. Exploring partnerships with field teams in construction, maintenance, and field service.
Deep expertise in EKF-based sensor fusion (IMU, GNSS, LiDAR, ToF, UWB). We architect cm-level positioning systems for autonomous platforms, specializing in real-time corrections and robust performance in high-vibration or signal-challenged environments.
Bridging the gap between the lab and the field. We design specialized R&D environments and "Digital Twins" to simulate and validate sensor performance. We partner on cutting-edge integrations, including Generative AI for navigation and synthetic data generation for autonomous flight.
Ensuring technical excellence from prototype to scale. We design the specialized testing frameworks and validation protocols necessary to prevent performance drift during growth, ensuring your final product delivers the exact precision the physics intended.
Challenge
Achieving 1-cm accuracy in "urban canyons" and signal-challenged environments where standard GNSS is degraded or unavailable.
Solution
Architected proprietary RTK Integer Ambiguity Resolution and tight-coupling GNSS/INS algorithms. This receiver-agnostic technology delivers stable, high-accuracy positioning by maximizing data from single-satellite aiding and inertial sensors.
Challenge
Providing high-accuracy reference data for ADAS and autonomous platforms in enclosed, signal-restricted environments.
Solution
Engineered world-first indoor test facilities by fusing INS with UWB systems and novel retro-reflective laser tracking. These multi-technology architectures provide driving robots and mobile platforms with the seamless, cm-level spatial awareness required for stable navigation without GNSS access.
Challenge
Moving high-complexity drone prototypes into mass production while maintaining absolute sensor integrity and flight-critical performance.
Solution
Led sensor selection and characterization (ToF, LiDAR, IMU, Ultrasonics) for a major autonomous drone program. Designed the automated validation protocols and production-line fixtures necessary to ensure every unit met rigorous technical specifications, enabling remote troubleshooting across distributed manufacturing sites.
| Domain | Tools & Technologies |
|---|---|
| Languages | C/C++ (Safety-Critical), Python, Matlab/Octave |
| Robotics | PX4, EKF, GNSS/INS, SLAM, 3D Kinematics |
| Sensors | LiDAR, ToF, UWB, Ultrasonics, IMU, Cameras |
| Platforms | Embedded, RTOS, Linux, AWS |
After completing a PhD in geometry processing at the University of Konstanz, Germany in 2008, I joined Yotta DCL (Oxford Metrics Group, UK) as an algorithms engineer, working in GIS on projects including map generation from GPS traces, automated survey route planning across multiple map formats, and road condition assessment from scan data.
In 2010 I moved to Oxford Technical Solutions (OXTS), where I spent eleven years developing GNSS, sensor fusion, and indoor navigation algorithms. Over time I took on a lead role and founded the core Navigation team — the period during which I grew most, both technically and as a leader.
In 2021 I joined Amazon Ring in my hometown of Iași, Romania, working on the Ring indoor drone programme — from sensor fusion and sensor selection through to designing calibration and validation fixtures for mass-production final testing.
In 2026 I founded Vertex Metrics SRL to offer specialized consulting and engineering services in navigation architecture, sensor fusion, and production-readiness across autonomous systems and robotics.
Date
23 April 2026
Topic
Discussion on establishing a workgroup for drone research and development at the Technical University of Iași.
Date
20 May 2026
Venue
Learn more about Photogrammetry and Remote Sensing